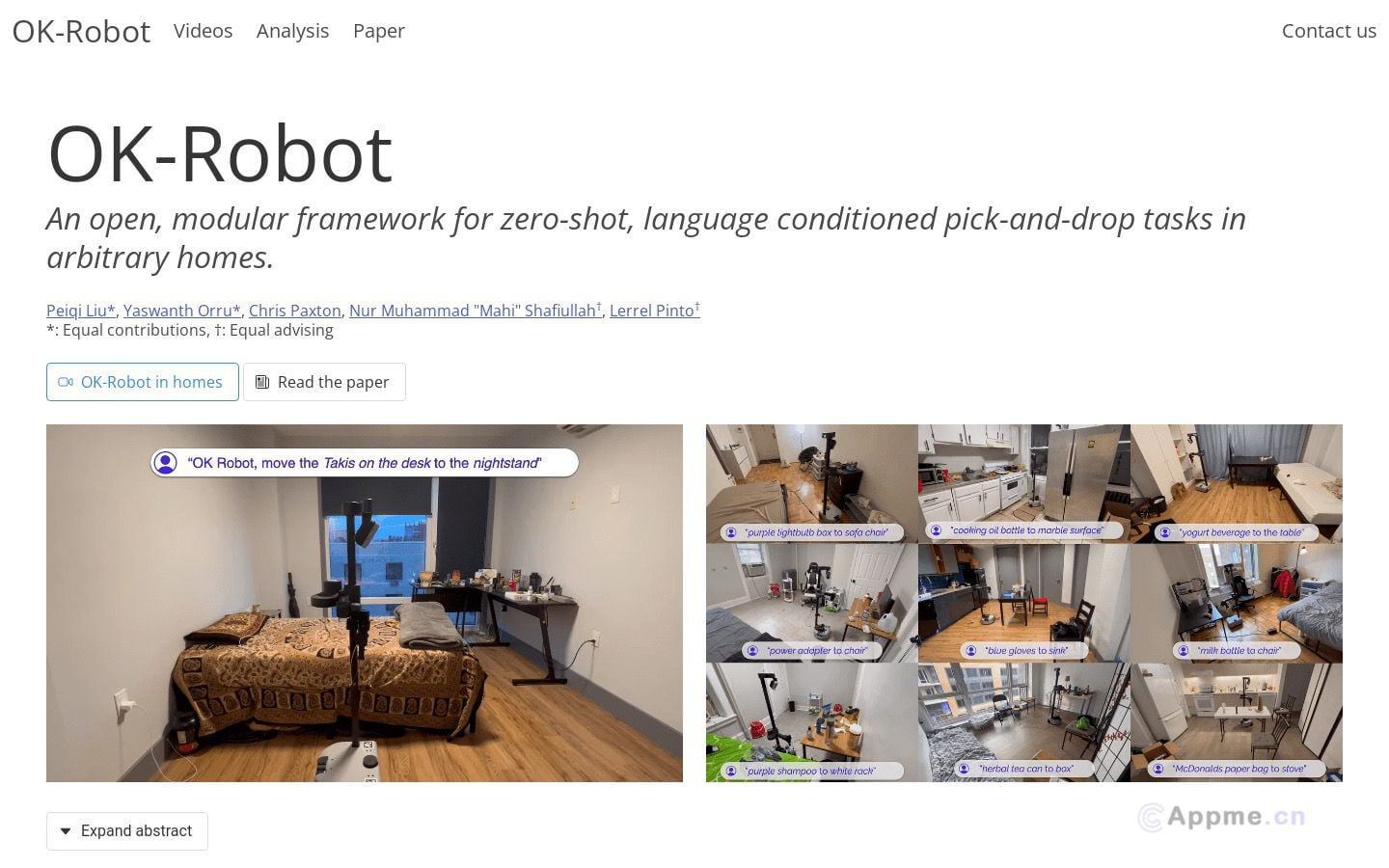
OK-Robot是一个开放的模块化框架,实现了在任意家居环境下根据语言指令进行零样本物品搬运任务。该框架采用了模块化设计,使用3D VoxelMap进行开放词汇的导航,AnyGrasp和LangSam进行开放词汇的抓取,以及放置原语进行物品放置。框架不需要预先训练,可以实现语言指令的零样本泛化。
需求人群: "家居服务机器人,实现搬运物品等家务辅助功能" 使用场景示例: 把红色的橄榄油瓶从桌子上拿到冰箱把遥控器从沙发移到茶几上把苹果从果盘中取出来拿到厨房 产品特色: 开放词汇的导航系统开放词汇的抓取系统放置物品的原语系统模块化设计,容易扩展零样本泛化,无需预训练