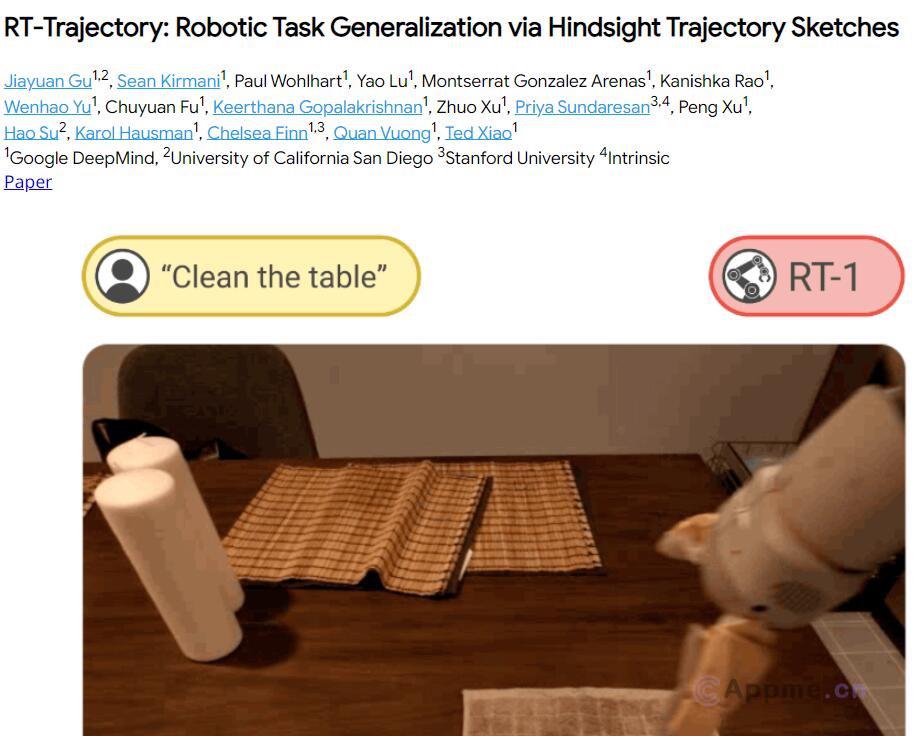
RT-Trajectory是一款创新的机器人控制策略软件,核心功能是通过粗糙轨迹草图实现对新任务的有效泛化。它支持多种轨迹草图生成方式,包括人工绘制、视频演示以及图像生成模型等。该软件在真实世界机器人任务中表现出色,相比传统的基于语言和目标的策略,具有更广泛的任务执行能力和适应性。RT-Trajectory主要面向机器人研究人员、工程师和开发者,为他们提供了一种灵活高效的机器人控制解决方案。通过使用该软件,用户可以大幅提高机器人在复杂环境中的适应能力和任务执行效率,加速机器人应用的开发和部署过程。RT-Trajectory为机器人技术的进步和实际应用推广做出了重要贡献。